DC Motor Velocity Control
Control
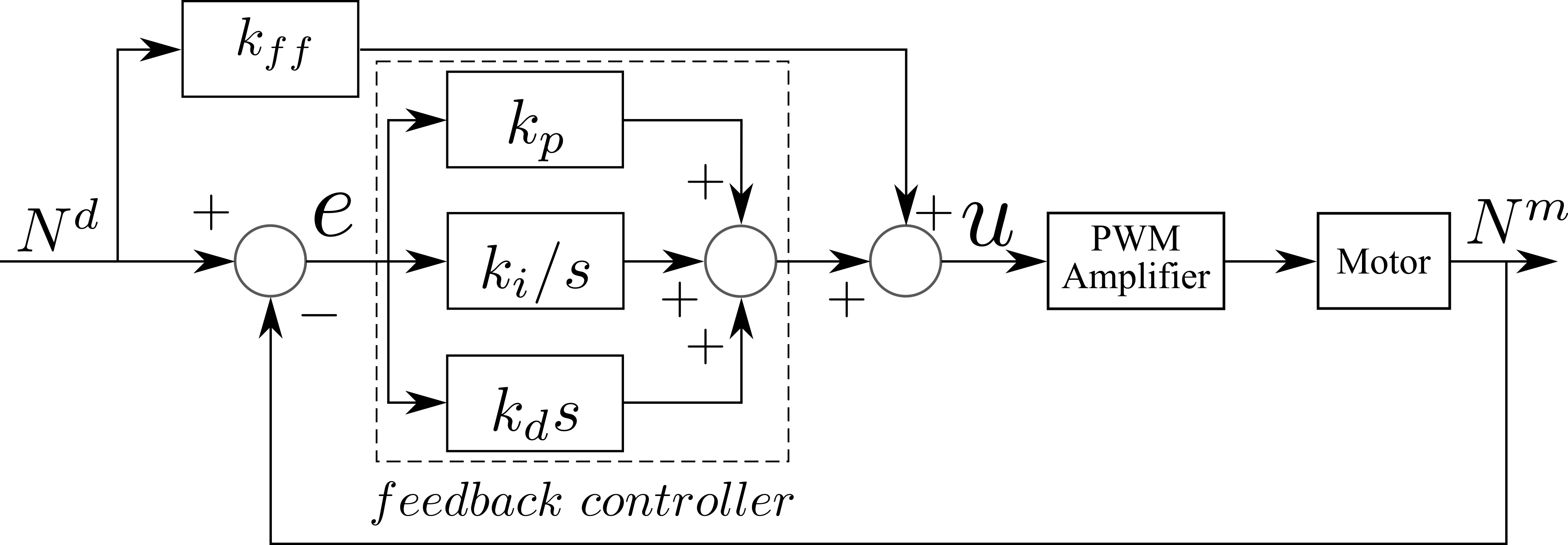
The desired motor speed $N^d$ are achieved using feedforward and feedback controller. The feedforward cotroller converts motor speeds into PWM commands using the velocity feedforward gain $k_{ff}$. The speed error $e$ between the desired $N^d$ and the measured $N^m$ motor speed which is measured from the encoder are sent to the feedback controller. The feedback controller computes feedback command using PID control law. The combination of feedforward and feedback command are send as control input $u$ to the PWM amplifier. The PWM amplifier’s output voltage
powered the motor to achieve the desired motor speed.