MCD6A: ESP32 TB9054 Motor Controller
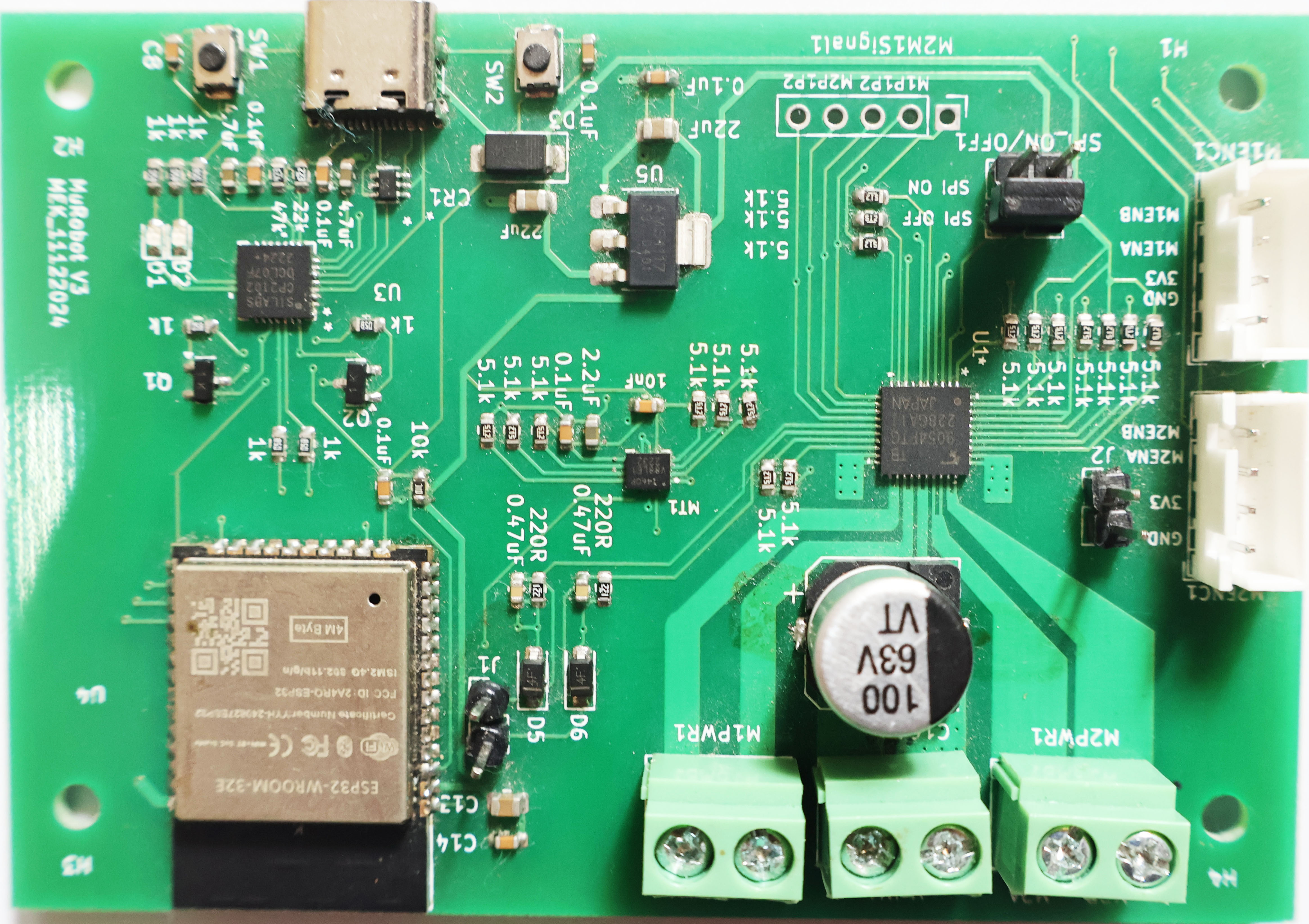
This library is for custom dual channel, H-bridge, brushed DC motor controller with encoder quadrature decoder, current sensing and onboard ESP32 micro-controller for control, automation and robotics application. It can also support external H-bridges drivers connected with ESP32 devkit with/without encoder. It may required certain modification.
Application
Robotics application such as ground robots, self-balancing robot and automation application etc.
Specification
- Motor Driver : Dual channel, H-bridge.
- Control Input : PWM with frequency from $1-10\ khz$.
- Operating Voltage : $\mathrm{V_{BAT}}\ =\ 4.5\ \text{to}\ 28\ V$, $\mathrm{V_{CC}}\ =\ 4.5\ \text{to}\ 5.5\ V$, $\mathrm{V_{DDIO}}\ =\ 3.0\ \text{to}\ 5.5\ V$.
- Operating Temperature : $Ta\ =\ -40\ \text{to}\ 125^o\mathrm{C}$
- Protection : Stop output for supply under voltage, over current, over temperature.
- Sensing : High voltage side output current monitoring.
- Encoder Decoder : Onboard quadrature decoder of dual channel digital encoder for motor rpm measurement with onboard power supply to encoder sensor.
- Interfacing : USB serial interface of micro-controller with computer for two-way communication firmware upload, control, communication and sensors data streaming.
- Control : Onboard PID control of motor RPM with onboard speed and current sensing.
Hardware Support
- Custom Controller using ESP32.
- ESP32 devkit with separate H bridge motor driver.
Getting Started
Please find the datasheet for more details implementation